About
Aspiring Roboticist and Aerospace Engineer pursuing a B.S. in Mechanical Engineering with a minor in Electrical Engineering at Washington State University. Interdisciplinary engineer with experience in robotics & mechatronics, autonomous systems, and GN&C, across both hardware, software and simulation.
Work Experience
Sierra LoboOrbital RoboticsCo-op
Co-op focused on orbital robotics using ROS and NVIDIA Isaac Sim; contributing to autonomy & simulation workflows.
WSU, SIAS Lab, Dr. HosseinzadehQuadruped Robotics
Developing Isaac Sim implementation of HuNavSim for Unitree Go2 quadruped, modeling social intention and enabling safe path planning around people.
UF, RISING Lab, Dr. Sandip RayROS2GazeboCV
Built ROS2/Gazebo AV testbed; lane following & traffic-sign detection (OpenCV, YOLOv8, PID, Kalman Filter); embedded integration on RPi4 and custom drivers.
Amazon, PAE2Top 100 NA
Ranked top 10 at PAE2 and top 100 in North America (Season 25) for speed & accuracy.
Relevant Experience
Palouse RoboSubAUV/ROVROS2
Led development of GNCea: Gazebo Harmonic AUV/ROV simulator with custom C++ plugins (thrust allocation, buoyancy, hydrodynamic drag), 6-DOF teleop, and autonomy.
WSU Robotics ClubQuadruped RoboticsROS1
Implemented a quadruped prototype URDF, joint controllers, and ROS1 Melodic control plugins for Gazebo/RViz and developed/integrated inverse kinematics with the CHAMP/CHVMP locomotion framework to enable stable, efficient gait control.
NASA L'SPACE Mission Concept Academy (Team 27 Venera Nova)CDHTechnical Writing
Designed CDH subsystem, ran trade studies, and developed Siemens NX CAD for a robotic space mission through SDR (System/Software Definition Review), PDR (Preliminary Design Review) and CDR (Critical Design Review).
Skills
check out my latest work
I've worked on a variety of projects. Here are a few of my favorites.
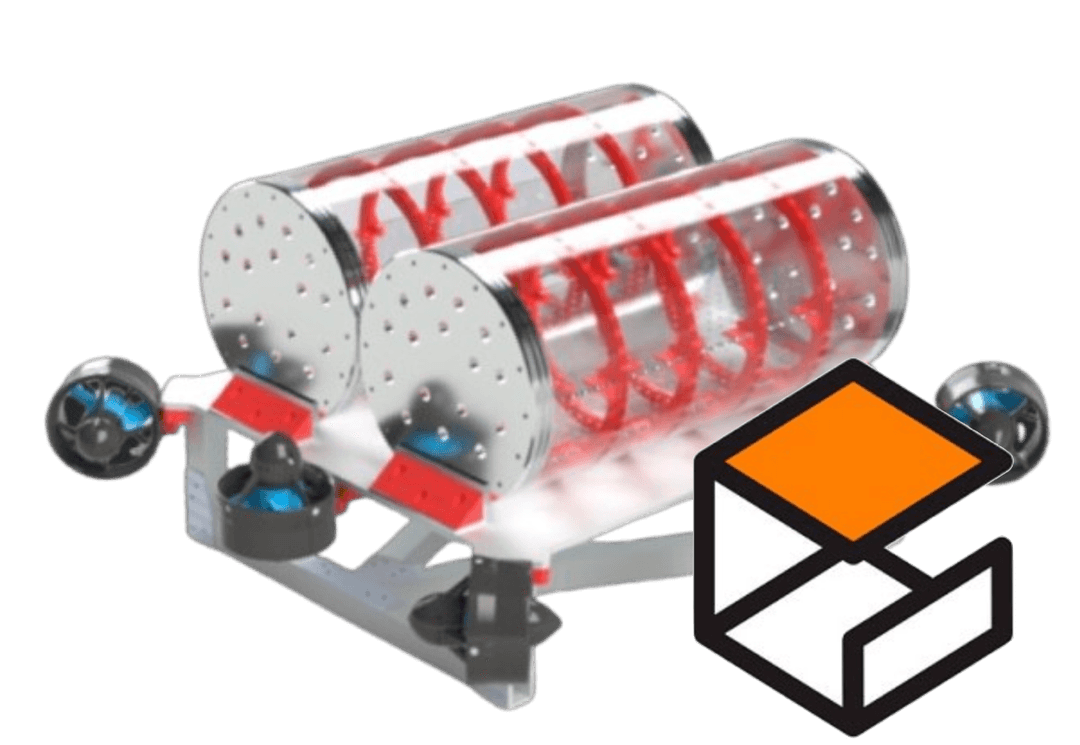
GNCea, an AUV/ROV Simulator
ROS 2 Jazzy based simulator in Gazebo Harmonic with custom C++ plugins for thrust allocation, buoyancy, and hydrodynamic drag; real-time 6-DOF teleop, depth/altitude control, and camera/LiDAR perception.
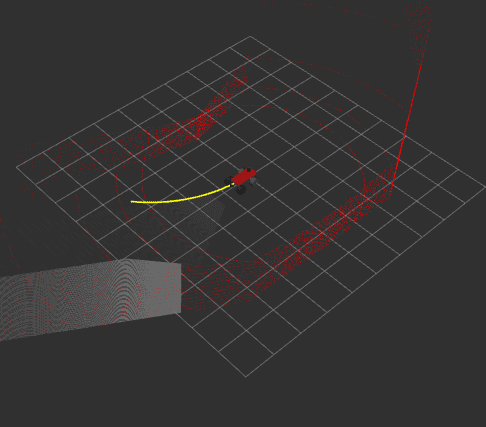
F1Tenth Algorithms
ROS 2 Humble F1Tenth autonomous racing stack for Ackermann vehicles, featuring Follow-the-Gap and wall-following with RGBD + 3D LiDAR perception; supports multi-vehicle racing scenarios and real-time reactive navigation.

Camera Sensor Attack Testbed
PiCar-X/RPi4 vision-only AV testbed with dual-lane pipelines (HSV, Canny/Hough), YOLO sign detection, PID + Kalman Filter control, and live telemetry to study reflective/blinding/spoofing attacks and mitigations.
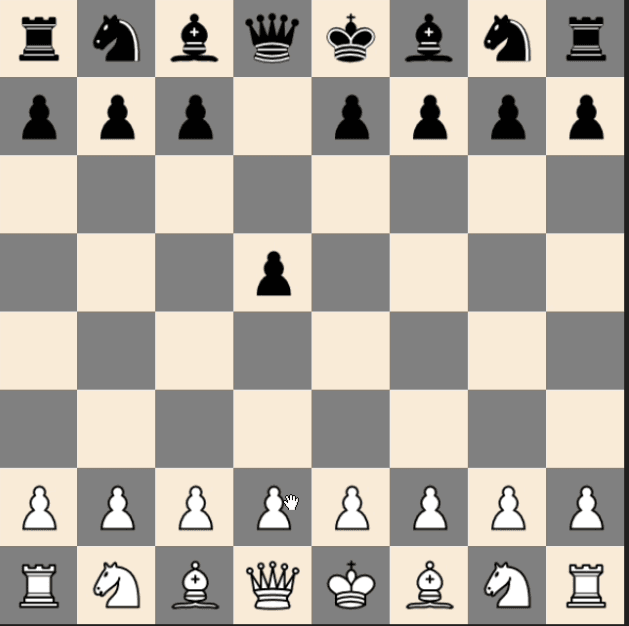
React Chess Engine
Interactive chess engine with full rule enforcement (promotion, en passant, check detection) and OOP move validation via a centralized Referee; drag-and-drop UI.

A* Path Planning Simulation
Grid-based A* simulator in Python showcasing shortest-path computation, obstacle avoidance, and heuristic search.
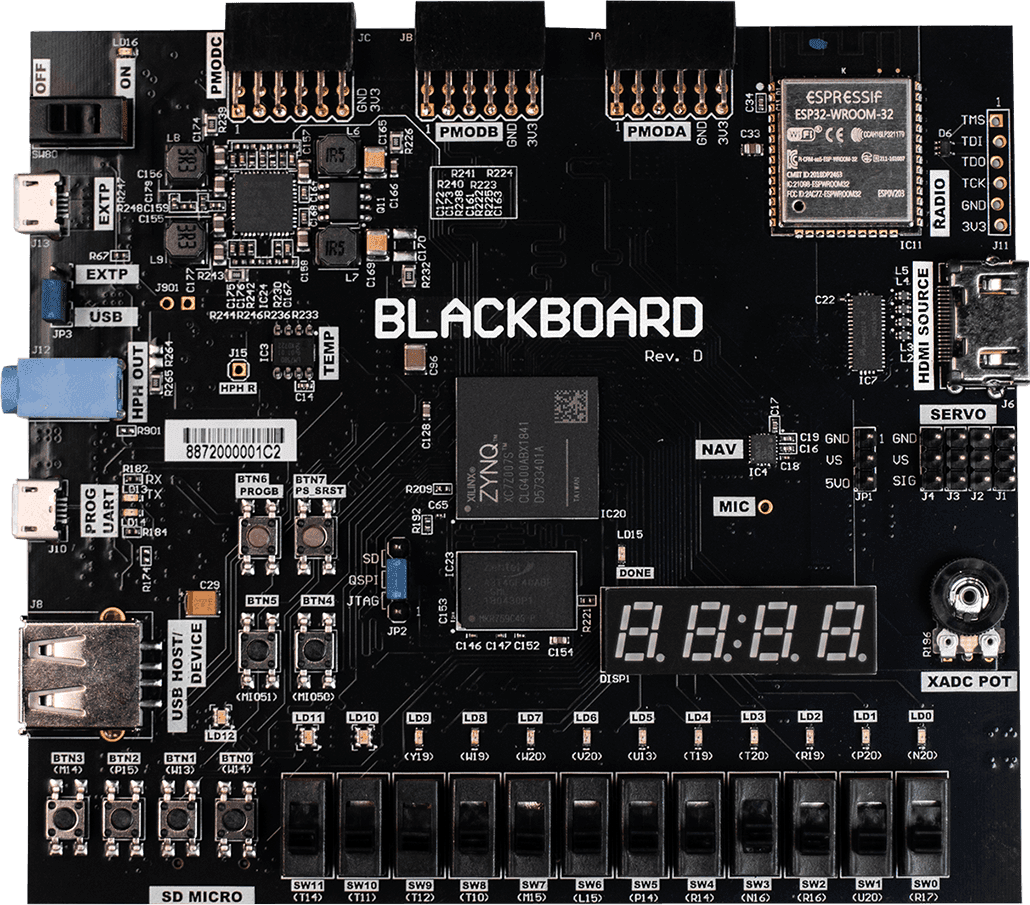
Verilog Stopwatch & Calculator
Stopwatch and calculator implemented in Verilog on Xilinx ZYNQ XC7007S with seven-seg display, switches, and push buttons.